Treasure Collecting Robot
Project Goal: Built an autonomous treasure collecting robot capable of linefollowing, infrared signal detection and filtering, magnet detection and autonomous driving.
Outcome: Semi-finalist robot placed 4th out of 16 teams. Stored and obtained 3 treasures.
Teammates:
Links: Poster PDF, Video Demo, GitHub Repo, Course Info
Key Features:
Autonomous driving:
- Programmed a PD controller in C++ for autonomous navigation on STM32 Micro-controller
- Soldered phototransistor circuits for a reflection sensor to navigate following black tape on a white floor
- Infrared sensor circuits captured infrared signals from different beacons
Object detection and sensing:
- Designed and soldered bandpass filter for distinguishing infrared signal frequencies
- Wired sonar sensors to detect treasures
- Hall-effect sensors scanned treasures to detect magnetic fields for false treasures
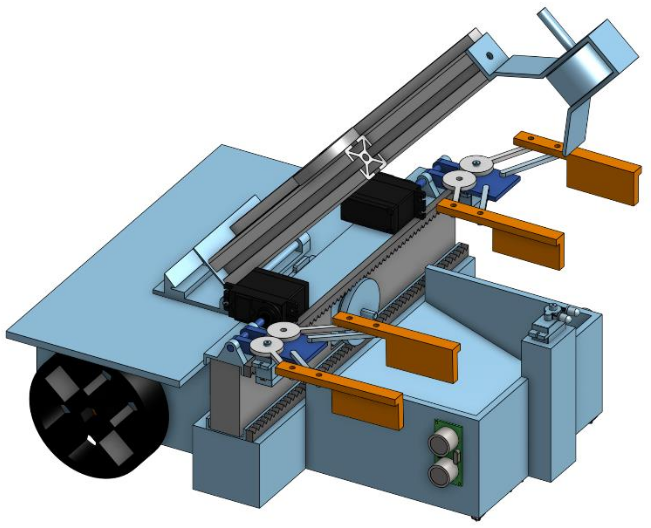
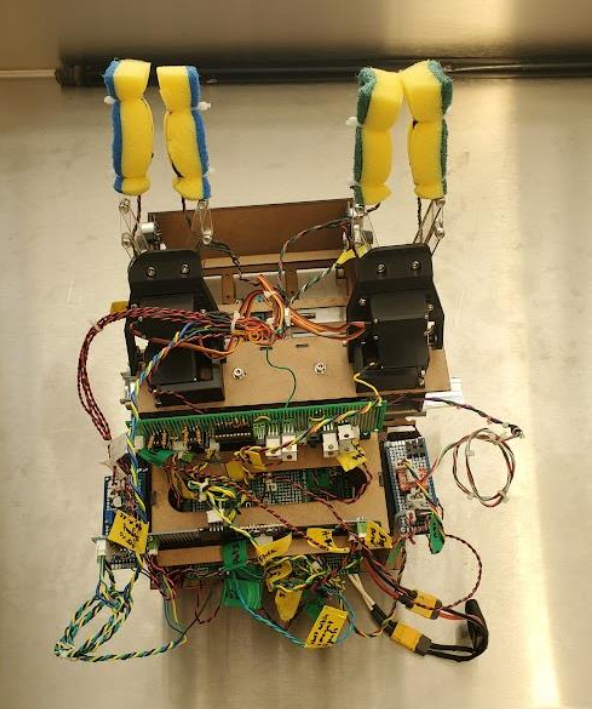
Claw & treasure capturing:
- Double rack-and-pinion claw mount powered by stepper motor for placement and servo motor for grabbing motion
Images: